3D Point Cloud Intra-Patient Lung Registration via Optimal Transport Methods
Overview
Accurate intra-patient lung CT registration is critical for radiation therapy planning, longitudinal disease tracking, and 4D CT motion modelling. However, large non-rigid deformations between expiratory (EXP) and inspiratory (INSP) phases make this task challenging, and intensity-based approaches can lead to mismatch. This work adapts the Iterative Optimal Transport (IOT) framework (which was originally proposed for 2D multimodal image registration) to the problem of 3D intra-patient lung registration using pulmonary vessel point clouds derived from paired EXP/INSP CT scans.
Key Contributions
- Adapted the IOT framework from 2D multimodal images to 3D pulmonary vessel point clouds, introducing a 3D Förstner corner detector for structure-aware point sampling and per-axis unit-variance normalization.
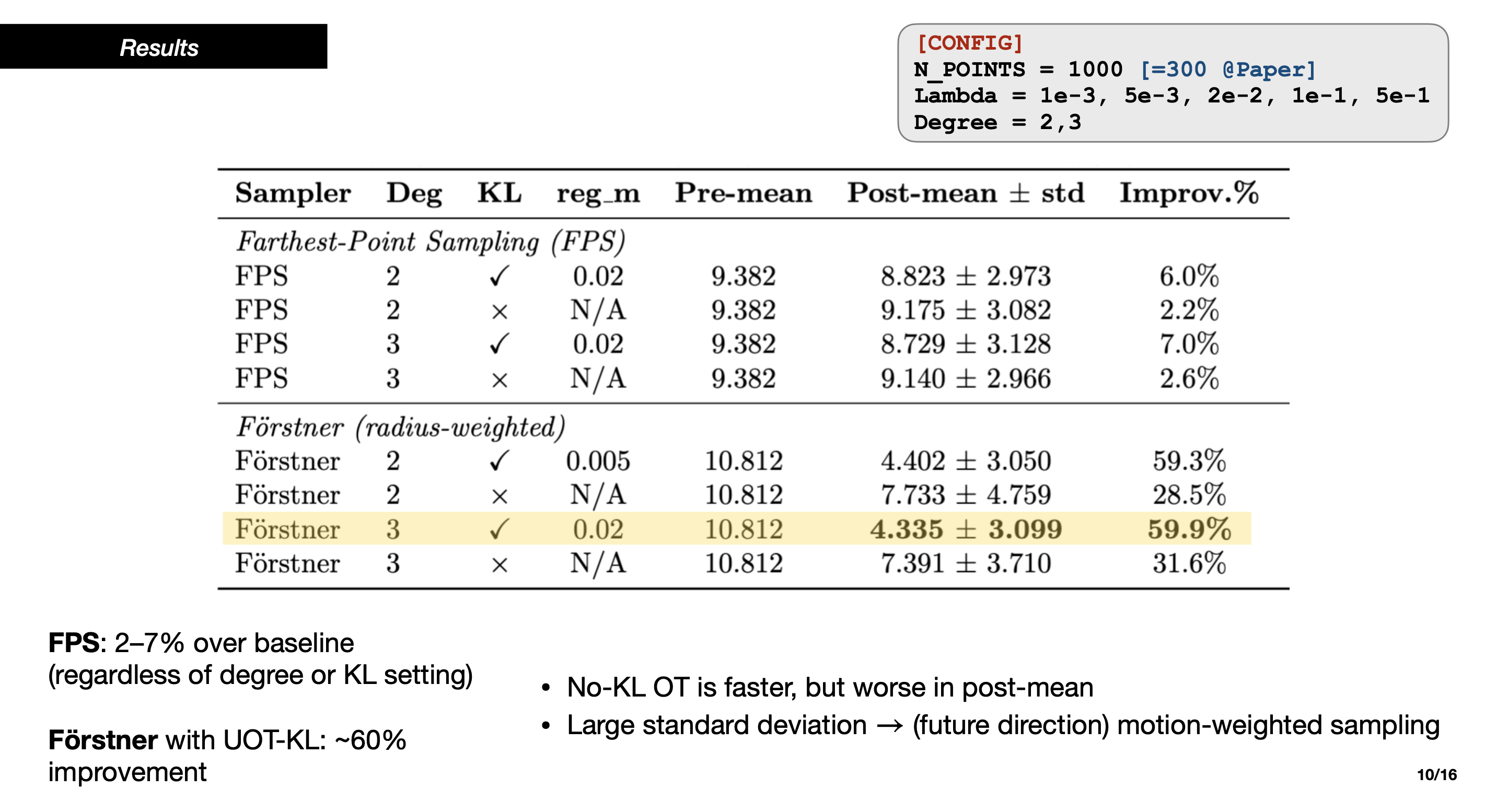
- Demonstrated that the choice of point sampler is the dominant factor in registration quality: Förstner-scalar sampling with UOT-KL achieves a ~60% reduction in mean nearest-neighbor distance, compared with at most 7% for farthest-point sampling.
- Showed that KL marginal penalties are necessary even in the same-modality 3D setting, where phase-dependent vascular visibility creates mass imbalance between fixed and moving point clouds — dropping KL significantly degrades performance.
- Established that increasing polynomial degree from 2 to 3 yields only marginal, largely non-significant improvements, suggesting the geometric quality of sampled points matters far more than model expressivity.
Presentation Details
Presented as an end-of-quarter talk for Radiological Science 99 (SRP99) to the entire Hsu Lab at UCLA. Work conducted under the instruction of Dr. William Hsu and the guidance of Yunzheng Zhu.